Տрадիցիոնալ սեղմող կորչի մաքինաներից համեմատելիս, RAYMAX-ի հիմնավորումը հիբրիդ տեխնոլոգիայի զարգացման մեջ թույլ է տալիս ձեզ արդյոք 60%-ից ավել էներգիայի խախտում ստանալ:
Հիբրիդ սեղանակային մաքուրավորչի մաքուրավորման համար պահանջվող հիդրոլիկ 泊-ի և էներգիայի ծախսը նվազեցնում է, ինչպես նաև ազդեցություն ունի ծռողական հատկությունների վրա:
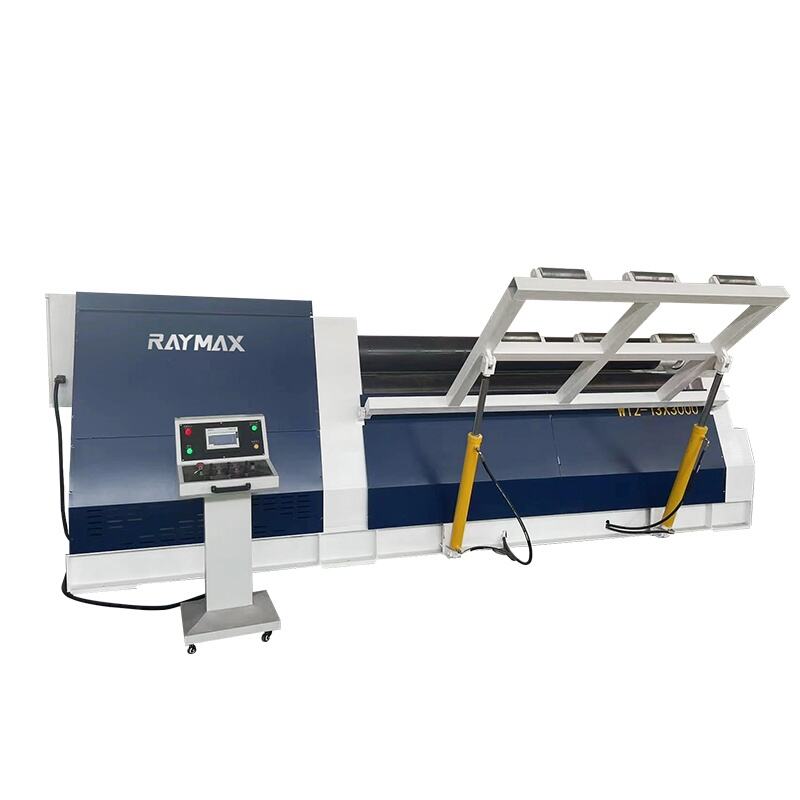
1.Press brake-ն ընդունում է ամբողջովին էլեկտրական սերվո դիզայնի ճշգրիտ ծալովի մահճակալը և ունի բարձր կոշտություն և կայուն մարմնի դիզայն:
2. CNC մամլիչ արգելակն ընդունում է բարձր արագության հետևի չափիչ և ճշգրիտ երկակի սերվո շարժիչի spindle drive, որը կարող է հասնել կայուն վերամշակման բարձր արագությամբ ճշգրտությամբ:
3. Սեղմեք արգելակը կարող է զգալիորեն խնայել օգտագործվող էներգիայի 60%-ը, և կարիք չկա կանոնավոր կերպով փոխարինել նավթի և նավթի ճնշման փականը:
4. Մամուլի արգելակային մեքենան չունի նավթի ջերմաստիճանի փոփոխության խնդիր, որը ազդում է մշակման ճշգրտության վրա, ինչը կարող է նվազեցնել ջերմային ազդեցության ազդեցությունը:
5. Էլեկտրական մամուլի արգելակը հարմար է փոքր նմուշների արագ արտադրության և մեծ թվով բարձր արագությամբ և բարձր ճշգրտության կայուն մշակման համար:
6. Մամուլի արգելակը կարող է օգտագործվել բազմափուլ շարունակական համակցված ճկման մշակման մեջ, ինչը մեծապես բարելավում է արտադրության արդյունավետությունը:
|
Տեսակ |
30T1250 |
40T1600 |
60T2000 |
70T2500 |
|
|
Անվանական ճնշում (kn) |
300 |
400 |
600 |
700 |
|
|
Աշխատանքային նստարանի երկարությունը (մմ) |
1250 |
1600 |
2000 |
2500 |
|
|
Բևեռների հեռավորությունը (մմ) |
1010 |
1360 |
1800 |
2100 |
|
|
Բացման առավելագույն բարձրությունը (մմ) |
465 |
560 |
560 |
560 |
|
|
Կոկորդի խորությունը (մմ) |
300 |
300 |
350 |
350 |
|
|
Slider արագություն |
Արագ արագություն |
200 |
200 |
200 |
200 |
|
Վերադարձի արագություն |
180 |
180 |
180 |
180 |
|
|
Վերադարձի արագություն |
0-30 |
0-30 |
0-30 |
0-30 |
|
|
X առանցքի հարված (մմ) |
450 |
450 |
500 |
500 |
|
|
R առանցքի հարված (մմ) |
150 |
150 |
150 |
150 |
|
|
Քաշ (T) |
3.8 |
4.5 |
5.5 |
6.5 |
|
|
Չափերը L*W*H (մմ) |
2000*1600*2490 |
2200*1600*2590 |
2700*1700*2690 |
3000*1700*2690 |
|
|
Շարժիչ (KW) |
2*12 |
2*12 |
2*24.1 |
2*24.1 |
|
- CNC DELEM կառավարման համակարգ
- INNOVANCE Servo Motor
- Pump First USA ապրանքանիշ
- Հիդրավլիկ փական BOSCH-REXROTH գերմանական ապրանքանիշ
- Foot Pedal Italy Pizzato ապրանքանիշ
- Քանոն GIVI Իտալիայի ապրանքանիշ
- Էլեկտրական Schneider France ապրանքանիշ
- Ball Screw & Linear ուղեցույց Hiwin Taiwan ապրանքանիշը
- Արագ սեղմում
- Թեթև վարագույր KELI ապրանքանիշ (տարբերակ)
- Բարձր ճշգրտություն. էլեկտրական մամլիչ արգելակային մեքենաների ճկման ճշգրտությունն ավելի բարձր է՝ մեկ ճկման համար ընդամենը 0,01 միլիմետր սխալով, որը հարմար է բարձր ճշգրտության և փոքրածավալ արտադրության համար:
- Էներգիայի ցածր սպառում. Էլեկտրական համակարգը շատ էներգաարդյունավետ է, էներգիա է սպառում միայն սեղմման գործընթացում, մինչև 90% էներգաարդյունավետությամբ:
- Շրջակա միջավայրի պաշտպանություն. հիդրավլիկ յուղի արտահոսքի վտանգ չկա, և դա չի առաջացնի աշխատանքային միջավայրի աղտոտում, որը համապատասխանում է շրջակա միջավայրի պաշտպանության ժամանակակից հասարակության պահանջներին:
- Հեշտ է գործել. բարդ հիդրավլիկ վրիպազերծման կարիք չկա, օպերատորները կարող են արագ սկսել և բարելավել արտադրության արդյունավետությունը:
- Հեշտ սպասարկում. պահպանման ցածր պահանջներ, նվազեցնելով սարքավորումների խափանումների հետևանքով առաջացած անգործությունը:
Հիդրավլիկ մամլիչ արգելակային մեքենայի կամ էլեկտրական սեղմիչ արգելակման մեքենայի միջև ընտրությունը կախված է արտադրության հատուկ կարիքներից և շրջակա միջավայրի պահանջներից: Հիդրավլիկ մամլիչ արգելակային մեքենաները լավ են կատարում մեծ տոննաժի և բարձր բեռնվածության առաջադրանքները, մինչդեռ էլեկտրական սեղմիչ արգելակման մեքենաներն ավելի շատ առավելություններ ունեն էներգիայի պահպանման, շրջակա միջավայրի պաշտպանության և բարձր ճշգրտության արտադրության մեջ:
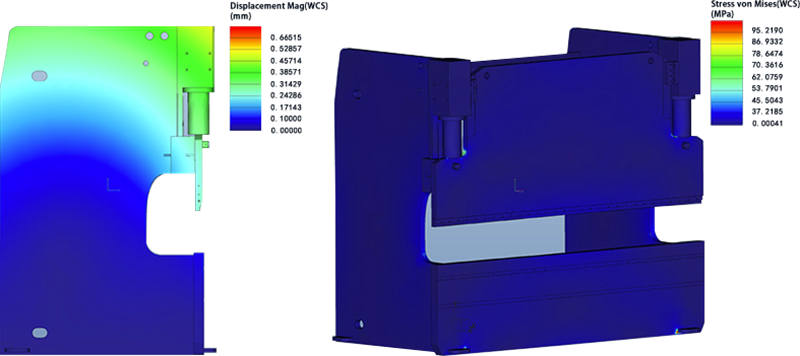
Մեքենայի մարմինը գտնվում է ընդհանուր եռակցված և ընդհանուր մշակված կառուցվածքում, և ANSYS վերջավոր տարրերի վերլուծության ծրագրակազմը կիրառվում է մեքենայի մարմնի հիմնական մասերի վրա վերլուծության համար, որն ապահովել է հաստոցների հուսալիությունը և ամբողջ մեքենայի ճշգրտությունը: Յուրաքանչյուր սեղմիչ արգելակի հիմքը ամուր, մոնոբլոկ շրջանակ է, որը պատրաստված է գործարանային սերտիֆիկացված, բարձր արտադրողականությամբ պողպատից: Արդյունքում մեր սեղմիչ արգելակները տարեցտարի ճշգրիտ և հուսալի են աշխատում:


-10.1" բարձր լուծաչափով գունավոր TFT
-2D գրաֆիկական սենսորային էկրանի ծրագրավորում
-«Թեժ ստեղնով» հպումային նավարկություն
- Մինչև 4 առանցք (Y1, Y2 + 2 օժանդակ առանցք)
-Profile-T անցանց ծրագիր

- 15 դյույմ բարձր լուծաչափով գունավոր TFT
- 2D գրաֆիկական սենսորային էկրանի ծրագրավորում
- Մինչև 4 առանցք (Y1, Y2 + 2 օժանդակ առանցք)
- Ճկման հաջորդականության հաշվարկ
- Profile-58TL անցանց ծրագրակազմ

- 17 դյույմ բարձր լուծաչափով գունավոր TFT
- 2D գրաֆիկական սենսորային էկրանի ծրագրավորման ռեժիմ
- 3D վիզուալիզացիա մոդելավորման և արտադրության մեջ
- Profile-T2D անցանց ծրագրակազմ

- 17 դյույմ բարձր լուծաչափով գունավոր TFT
- 2D և 3D գրաֆիկական սենսորային էկրանի ծրագրավորման ռեժիմ
- 3D վիզուալիզացիա մոդելավորման և արտադրության մեջ
- Profile-T3D անցանց ծրագրակազմ

- 24 դյույմ բարձր լուծաչափով գունավոր TFT
- 2D գրաֆիկական սենսորային էկրանի ծրագրավորման ռեժիմ
- 3D մեքենաների ներկայացում, մոդելավորման և արտադրության մեջ
- Profile-SL անցանց ծրագրակազմ

- 24 դյույմ բարձր լուծաչափով գունավոր TFT
- 3D և 2D գրաֆիկական սենսորային էկրանի ծրագրավորման ռեժիմ
- 3D վիզուալիզացիա, ներառյալ 3D մեքենաների ներկայացումը, մոդելավորման և արտադրության մեջ
- Profile-S3D անցանց ծրագիր


- 7” գունավոր գրաֆիկական CRT էկրան
- 2D գրաֆիկական պրոֆիլի ստեղծում ձեռքով հաջորդականությամբ
- Մինչև 4 առանցք (Y1, Y2 + 2 առանցք)
- Անկյունի և հետևի չափիչի ուղղում:
- Առաքվում է PC1200 օֆլայն ծրագրաշարով

- 12 դյույմանոց գունավոր գրաֆիկա՝ ամբողջությամբ սենսորային էկրանով
- Հպեք 2D գրաֆիկական մասի ստեղծում ձեռքով հաջորդականությամբ
- Մինչև 4 առանցք (Y1, Y2, X, R-առանցքներ)
- Անկյունի և հետևի չափիչի ուղղում:
- Առաքվում է PC-ModEva անցանց ծրագրաշարով

- 15 դյույմանոց գունավոր գրաֆիկա՝ ամբողջությամբ սենսորային էկրանով
- Հպեք 2D գրաֆիկական պրոֆիլի գծագրում և ճշգրիտ 2D ծրագրի ստեղծում
- Մինչև 6 առանցք (Y1, Y2, X, R, Z1, Z2-առանցքներ)
- VisiTouch 2D կամ VisiTouch MX անցանց ծրագրակազմ:


- 10 դյույմ LCD սենսորային էկրան (դիմադրողական)
- Հպեք 2D գրաֆիկական մասի ստեղծում ձեռքով հաջորդականությամբ
- Ստանդեր դեպի 4 առանցք (Y1, Y2, X, R)
- Անվճար օֆլայն համակարգչի մոդելավորման ծրագիր
- Տանդեմ մեքենայի կառավարում (տարբերակ)
- Modbus TCP ինտերֆեյս SCADA-ի կամ MES-ի համար (տարբերակ)
- 15 դյույմ LCD սենսորային էկրան (դիմադրողական)
- Հպեք 2D գրաֆիկական մասի ստեղծում ավտոմատ հաջորդականությամբ
- Ստանդեր մինչև 4 առանցք, կարող է մինչև 6 առանցք առավելագույնը:
- Անվճար օֆլայն համակարգչի մոդելավորման ծրագիր
- Տանդեմ մեքենայի կառավարում (տարբերակ, կարող է մինչև 4 մեքենա)
- Modbus TCP ինտերֆեյս SCADA-ի կամ MES-ի համար (տարբերակ)

- 18,5 դյույմ նախատեսված բազմակի սենսորային էկրանի համար
- Աջակցեք գործիքների ձևերի ներմուծմանը (.dxf ifles)
- Աջակցեք ESA 3D Bend ծրագրային ապահովմանը
- Վերազինեք ստանդարտ արդյունաբերության 4.0 Modbus TCP ինտերֆեյսը

- 21,5 դյույմ նախատեսված բազմակի սենսորային էկրանի համար
- Աջակցեք բազմակի հպումով հավելվածին
- Աջակցեք գործիքների ձևերի ներմուծմանը (.dxf ֆայլեր)
- Աջակցեք ESA 3D Bend ծրագրային ապահովմանը
- Վերազինեք ստանդարտ արդյունաբերության 4.0 Modbus TCP ինտերֆեյսը

Օգտագործելով մեխանիկական արագ սեղմիչ վերին ձուլակտորների համար, փոխելով ձողերը ավելի հարմար և անվտանգ:

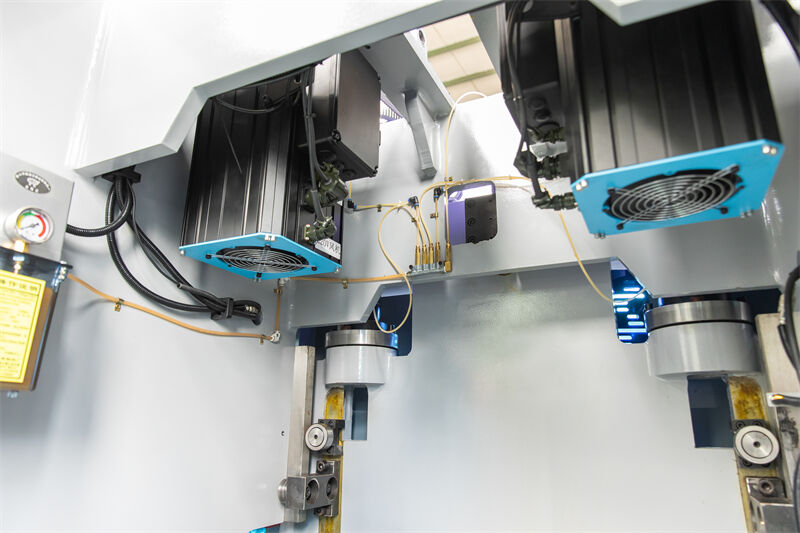
Փոխանցման սահիչը փոխադարձ է, ելքային ուժը կայուն է, փոխանցման ճշգրտությունը բարձր է, և ճկման ճնշման հետևողականությունը երաշխավորված է:

Շարժական առջևի նյութի հենարանը գծային ուղեցույցի վրա կարող է ձեռքով շատ հեշտությամբ շարժվել աջ և ձախ:

Օգտագործելով servo շարժիչը դիրքավորման առանցքը վարելու համար, մեխանիկական կառուցվածքը կոմպակտ է, վազքի արագությունը արագ է, կայունությունը բարձր է, և կրկնվող դիրքավորման ճշգրտությունը բարձր է:
- Փոխեք սկզբնական Siemens շարժիչը
- Էներգիայի խախտում
- 40% էլեկտրաէներգիայի խախտում
- vess reduced
- Վառելիքի խնայողություն (ավելի փոքր, քան սովորական վառելիքի բաքը)

Այն շարժական է և կարող է ցանկացած պահի կանգնեցնել մեքենան արտակարգ իրավիճակների կոճակի միջոցով:

Եղեք ավելի անվտանգ մեքենայի շահագործման ընթացքում
Կողքի վրա գտնվող գործիքների պահարանը կարող է օգտագործվել նաև տարբեր գործիքներ պահելու համար:

DSP láser ապահովական սարքը անդամացնում է ծռողիչի օպերատորների անձնական ապահովությունը և փոխանցում է Gefährdung, die durch die մարմնի արագ շարժումը մաքինայի վրա:
Տաք Ապրանքներ