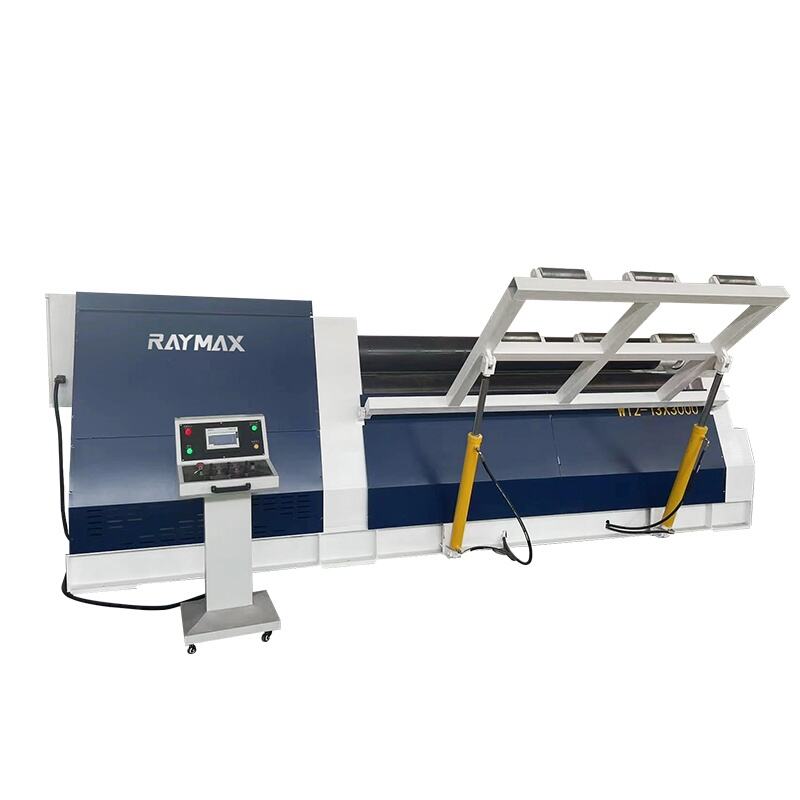
기계의 구조는 삼롤 대칭형이며, 상단 롤러는 두 개의 하단 롤러의 대칭 위치에 있어 수직 상승 운동을 합니다. 나사 웜 구동을 통해 상단 롤러의 상승 운동을 얻고, 감속기 출력 기어가 하단 롤러 기어와 맞물려 두 개의 하단 롤러의 상호 회전 운동을 얻어 판재를 굴리기 위한 토크를 제공합니다. 이 기계는 전체 구조로, 작업 부분과 주요 구동 부분이 강성 용접 베이스에 설치되어 있어 기계의 설치 및 조정이 용이합니다.
|
모델 |
최대 롤 |
최대 롤 |
상단 롤러 |
하단 롤러 직경 - (mm) |
본부 |
주 모터 |
|
W11-6x1500 |
6 |
1500 |
160 |
160 |
220 |
4 |
|
W11-4X2500 |
4 |
2500 |
160 |
140 |
220 |
5.5 |
|
W11-6x2000 |
6 |
2000 |
170 |
150 |
250 |
5.5 |
|
W11-8x2500 |
8 |
2500 |
240 |
180 |
280 |
7.5 |
|
W11-10x2500 |
10 |
2500 |
250 |
190 |
320 |
11 |
|
폭 11-12x2500 |
10 |
2500 |
260 |
220 |
320 |
11 |
|
폭 11-16x2500 |
16 |
2500 |
280 |
240 |
360 |
11 |
|
W11-20x2000 |
20 |
2000 |
280 |
240 |
360 |
11 |
|
폭 11-25x2500 |
25 |
2500 |
370 |
280 |
480 |
22 |
|
W11-30x2000 |
30 |
2000 |
360 |
290 |
480 |
22 |

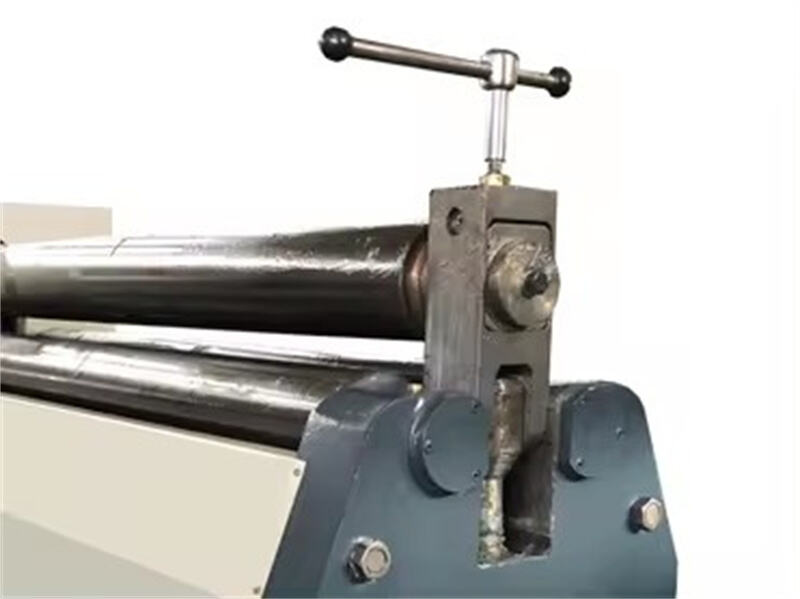
두 개의 하단 롤러는 구동 롤러이고 상단 롤러는 유동 롤러입니다. 상단 롤러는 두 개의 하단 롤러의 중앙 위치에서 수직 상승 운동을 하며, 상단 롤러의 상승은 모터, 감속기, 웜 기어 및 웜을 통해 실현됩니다.
수동 드롭 엔드 장치는 원통형 부품의 압연이 완료되었을 때 사용됩니다.


하부 롤러의 전달은 메인 감속기를 통한 메인 모터에 의해 실현됩니다.

이동 가능한 조작 테이블과 제어 상자로 구성되어 있습니다. 다운 롤러의 상승 거리는 광전 코더를 통해 하나의 조작 테이블에 표시될 수 있습니다.
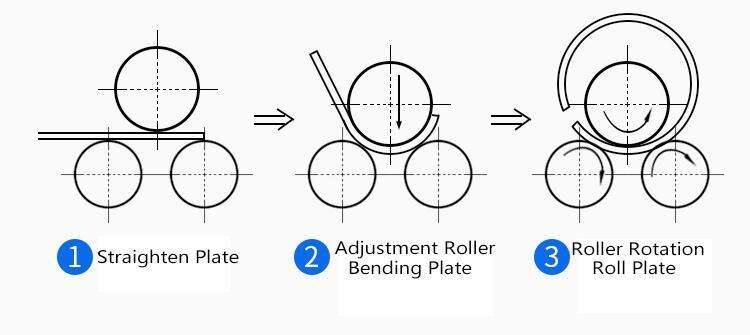
이 3롤러 대칭 롤링 머신은 상단 롤러의 압착과 상단 및 하단 롤러의 대면 롤링을 통해 원통형 작업물의 릴링을 수행합니다. 주로 작업 유닛, 구동 유닛, 밸런싱 유닛, 베이스 및 콘 유닛 등으로 구성됩니다.
1. 작업 단위
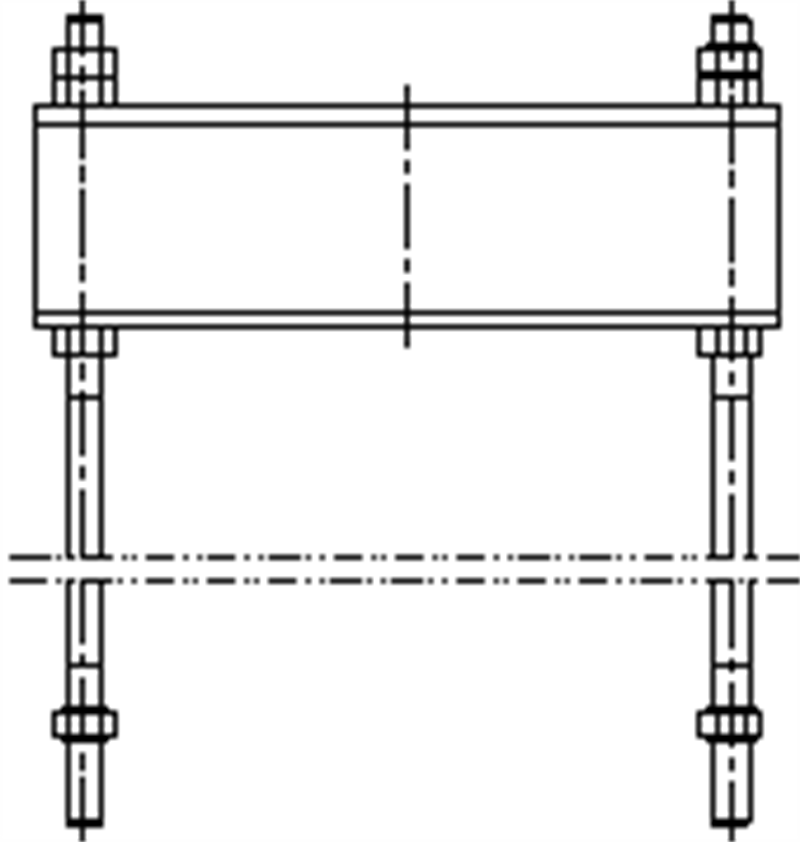
작업 유닛은 좌우 롤러의 베어링 스탠드, 하나의 상단 롤러, 두 개의 하단 롤러, 나사 웜 및 웜 기어와 일부 보조 부품으로 구성됩니다.
하부 롤러의 구동은 주 감속 모터를 통한 주 모터로 수행됩니다. 주 감속기의 출력 베어링은 기어 세트를 통해 두 개의 하부 롤러로 전달됩니다. 전달 방향의 변경은 주 모터의 방향 변경을 통해 얻습니다.
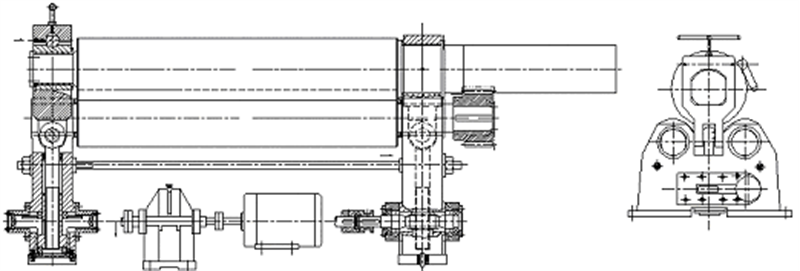
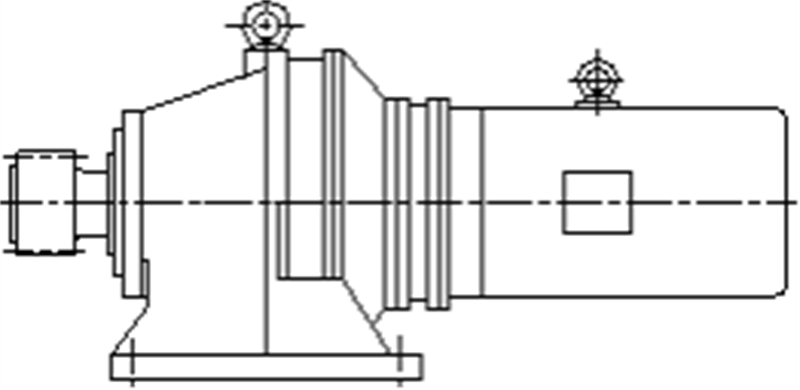
2. 메인 구동 장치
주 구동 유닛은 주 모터, 주 감속 모터 및 일부 보조 부품으로 구성됩니다. 하부 롤러의 구동은 주 감속 모터를 통해 주 모터로 수행됩니다. 주 감속기의 출력 베어링은 기어 세트를 통해 두 개의 하부 롤러로 전달됩니다. 전달 방향의 변경은 주 모터의 방향 변경을 통해 얻습니다.
3. 언로딩 유닛의 적용
실린더 작업물이 완성되면 왼쪽 베어링 스탠드에서 분리하기 전에 상단 롤러를 위치까지 올리고 밸런싱 빔으로 후면의 상단 롤러를 누른 다음 탭핑 베어링 스탠드에서 샤프트 핀을 빼내고 베어링 스탠드를 두드려 내립니다. 완성된 작업물이 상단 롤러의 한쪽에서 분리됩니다.